
視覺or激光雷達(dá)——誰將主導(dǎo)自動駕駛
來源:郭天戈 瀏覽人數(shù):31716 時間:2020/12/25
2019年4月,在美國加州舉辦的特斯拉投資者日活動上,特斯拉推出全自動駕駛Autopilot 硬件 3.0,這套系統(tǒng)包含8個視覺攝像頭,12個超聲波傳感器,以及自研的全自動駕駛芯片。
汽車自動駕駛的流程包括3個步驟:感知、判斷、操控。在感知層面,目前主要有兩種技術(shù)路線主導(dǎo)自動駕駛,一是基于攝像頭的視覺感知,二是基于激光雷達(dá)的物理感知。馬斯克從第一性原理出發(fā),讓汽車模仿人類,人類在駕駛汽車時通過眼睛獲取信息,經(jīng)過大腦處理后進(jìn)行判斷、操控,因此人類駕駛完全是視覺驅(qū)動。特斯拉堅(jiān)持以視覺為主導(dǎo)的自動駕駛方案,使用高性能的車載芯片處理來自視覺傳感器收集到的交通信息,通過深度學(xué)習(xí),將信號與已知的物體進(jìn)行匹配,再作出決策。
特斯拉在汽車周圍配置足夠多的攝像頭,創(chuàng)造出比人類眼睛視界更寬廣、更清晰的“攝像頭眼睛”,再配置比人類大腦反應(yīng)速度更快、計(jì)算能力更強(qiáng)的處理器芯片,以確保駕駛的安全性。然而,這一套縝密的系統(tǒng)并沒有足夠安全,攝像頭有天然的缺陷,當(dāng)遇到較強(qiáng)的反光或以白色為基調(diào)的物體時,系統(tǒng)可能會判斷成云朵甚至認(rèn)為沒有障礙物。在自動駕駛模式下,特斯拉曾出過多起事故,例如把白色的卡車判斷為云朵,加速穿過導(dǎo)致事故。
實(shí)際上,生物判斷方向并不全是通過眼睛,例如蝙蝠就是通過發(fā)射聲波、感知聲波反射的時間來判斷障礙物,激光雷達(dá)就是應(yīng)用這種原理實(shí)現(xiàn)汽車自動駕駛。激光雷達(dá)發(fā)射激光,遇到障礙物后原路返回,處理器利用時間計(jì)算距離。激光光束可以準(zhǔn)確測量物體輪廓邊緣與發(fā)射器間的距離,這些輪廓信息組成“點(diǎn)云”,然后處理器可以繪制出3D高精度環(huán)境地圖,從而準(zhǔn)確判斷汽車周圍的物理環(huán)境。另外,激光雷達(dá)有很迅速的響應(yīng)時間,可以使汽車的處理器快速應(yīng)對路況的變化。iPhone的前置結(jié)構(gòu)光3D攝像頭也是用了這種原理。無論是視覺路線還是激光雷達(dá),目的都是為了讓汽車“看清”周圍的環(huán)境,激光雷達(dá)可以直接提供物體的精確距離和位置,而攝像頭視覺方案需要計(jì)算機(jī)根據(jù)圖像來判斷,這就存在錯判的可能。目前參與自動駕駛研發(fā)的企業(yè)大多以激光雷達(dá)作為主導(dǎo),如谷歌Waymo、百度、UBER等。
為何特斯拉堅(jiān)持不用激光雷達(dá)?成本是阻礙其商業(yè)化的核心因素。Velodyne目前是全球規(guī)模最大的激光雷達(dá)供應(yīng)商,其最低配置的雷達(dá)型號起步價3999美元,主流型號價格在數(shù)萬美元,這與馬斯克“制造消費(fèi)者可負(fù)擔(dān)的電動車”的目標(biāo)不符,而且特斯拉汽車明年的全球銷量可能超過100萬輛,目前沒有供應(yīng)商有匹配的產(chǎn)能。
然而,情況正在迅速改變。隨著眾多研發(fā)型企業(yè)的加入,激光雷達(dá)技術(shù)快速更新迭代,成本也在快速下降。專注于固態(tài)激光雷達(dá)技術(shù)的硅谷新銳Luminar公司,計(jì)劃2022年開始將激光雷達(dá)交付于量產(chǎn)車,實(shí)現(xiàn)商業(yè)化,價格可能降低至500-1000美元。按照目前全球主要汽車制造商的預(yù)估,1000美元以內(nèi)是L4級別自動駕駛所需激光雷達(dá)的商業(yè)化價格目標(biāo)。近日,華為首次發(fā)布了車規(guī)級激光雷達(dá)產(chǎn)品和解決方案,也已經(jīng)建立第一條車規(guī)級激光雷達(dá)的產(chǎn)線,按照年產(chǎn)10萬套/線在推進(jìn)。華為表示:“激光雷達(dá)是解決連續(xù)自動駕駛體驗(yàn)的關(guān)鍵傳感器,其帶來的智能駕駛體驗(yàn)將遠(yuǎn)超任何一個已商用的智能駕駛系統(tǒng)。”發(fā)布會當(dāng)日,北汽新能源宣布2021年將推出全球首款搭載華為激光雷達(dá)的車型。此前小鵬汽車也表示,將在2021年生產(chǎn)的車型中采用激光雷達(dá)技術(shù)提高性能。
自動駕駛按照自動化程度分為五個等級:從L1級別的輔助駕駛到L5級別的完全自動駕駛,目前商業(yè)化的量產(chǎn)車型基本上在L2/L3以內(nèi),這一層級的自動駕駛以攝像頭視覺為主導(dǎo),但從長期趨勢上看,L5級別的完全自動駕駛才是最終的發(fā)展方向,而L3級以上基于視覺并不完全可靠。
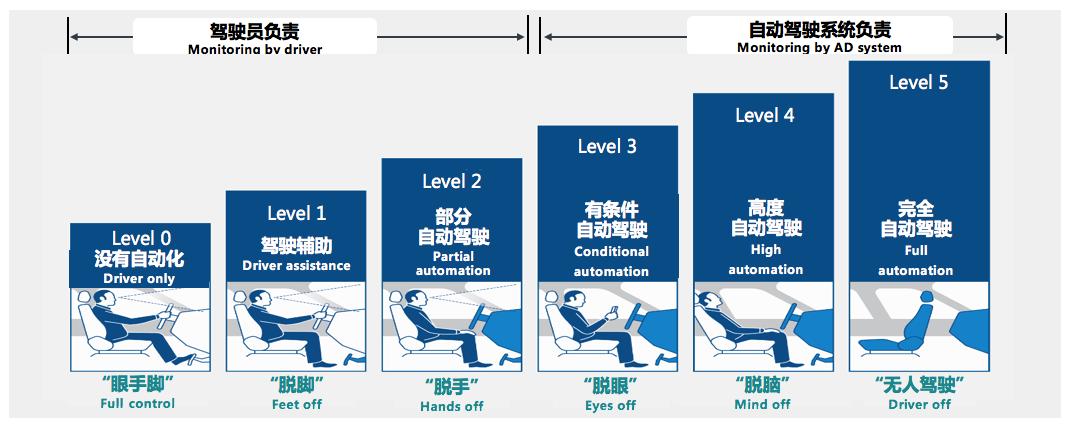
圖. 自動駕駛等級分類
產(chǎn)業(yè)界目前對最佳的自動駕駛方案沒有定論,但從乘客安全、技術(shù)升級、規(guī)模化量產(chǎn)降本的角度上看,預(yù)計(jì)攝像頭視覺和激光雷達(dá)將共同主導(dǎo)自動駕駛,兩者在技術(shù)上都有各自的優(yōu)勢和劣勢,互相配合、增加硬件冗余才能帶來絕對的安全。從消費(fèi)者角度看,增加少量購車成本以換取更高的安全度合乎邏輯,畢竟生命至高無上。
免責(zé)聲明
本資料僅供本公司的合格投資者參考閱讀,不因接收人收到本資料而視其為本公司的當(dāng)然客戶。本資料基于本公司認(rèn)為可靠的且目前已公開的信息撰寫,在任何情況下,本資料中的信息或所表述的意見不構(gòu)成廣告、要約、要約邀請,也不構(gòu)成對任何人的投資建議。本資料版權(quán)均歸本公司所有。未經(jīng)本公司事先書面授權(quán),任何機(jī)構(gòu)或個人不得以任何形式引用或轉(zhuǎn)載本資料的全部或部分內(nèi)容。
粵ICP備15108701號 版權(quán)所有:深圳展博投資管理有限公司
 粵公網(wǎng)安備 44030402005514號
粵公網(wǎng)安備 44030402005514號